Note
Go to the end to download the full example code.
Pushover and Dynamic Analyses of 2-Story Moment Frame with Panel Zones and RBS¶
Original example by Laura Eads, Stanford University, see here
This example is an extension of the Pushover Analysis of 2-Story Moment Frame and Dynamic Analysis of 2-Story Moment Frame examples which illustrates the explicit modeling of shear distortions in panel zones and uses reduced beam sections (RBS) which are offset from the panel zones. Both pushover and dynamic analyses are performed in this example. The structure is the same 2-story, 1-bay steel moment resisting frame used in the other examples where the nonlinear behavior is represented using the concentrated plasticity concept with rotational springs. The rotational behavior of the plastic regions follows a bilinear hysteretic response based on the Modified Ibarra Krawinkler Deterioration Model (Ibarra et al. 2005, Lignos and Krawinkler 2009, 2010). For this example, all modes of cyclic deterioration are neglected. A leaning column carrying gravity loads is linked to the frame to simulate P-Delta effects.
import matplotlib.pyplot as plt
import numpy as np
import openseespy.opensees as ops
import opstool as opst
Some helper functions¶
Creates a bilinear rotational spring that follows the Modified Ibarra Krawinkler Deterioration Model (used in the concentrated model)
def rot_spring_2d_mod_ik_model(
ele_id: int,
node_r: int,
node_c: int,
K: float,
as_pos: float,
as_neg: float,
My_pos: float,
My_neg: float,
LS: float,
LK: float,
LA: float,
LD: float,
cS: float,
cK: float,
cA: float,
cD: float,
th_pP: float,
th_pN: float,
th_pcP: float,
th_pcN: float,
ResP: float,
ResN: float,
th_uP: float,
th_uN: float,
DP: float,
DN: float,
):
"""
Create a 2D rotational spring using the Modified Ibarra–Krawinkler
deterioration model (Bilin material) in OpenSeesPy.
This function reproduces the Tcl procedure `rotSpring2DModIKModel`
by D. G. Lignos, creating:
1) A uniaxial Bilin material with strength and stiffness deterioration
2) A zeroLength element acting in rotational DOF (dir = 6)
3) An equalDOF constraint on translational DOFs (1, 2)
Parameters
----------
ele_id : int
Element (and material) identification tag.
node_r : int
Retained (master) node.
node_c : int
Constrained (slave) node.
K : float
Initial stiffness after n-modification (Ibarra & Krawinkler, 2005).
as_pos, as_neg : float
Post-yield strain hardening ratios (positive / negative).
My_pos, My_neg : float
Yield moments (positive / negative).
LS : float
Basic strength deterioration parameter.
LK : float
Unloading stiffness deterioration parameter.
LA : float
Accelerated reloading stiffness deterioration parameter.
LD : float
Post-capping strength deterioration parameter.
cS, cK, cA, cD : float
Exponents for deterioration laws.
th_pP, th_pN : float
Plastic rotation capacities (positive / negative).
th_pcP, th_pcN : float
Post-capping rotation capacities (positive / negative).
ResP, ResN : float
Residual strength ratios (positive / negative).
th_uP, th_uN : float
Ultimate rotation capacities (positive / negative).
DP, DN : float
Cyclic deterioration rates (positive / negative).
References
----------
Ibarra & Krawinkler (2005)
Ibarra et al. (2005)
Lignos & Krawinkler (2009, 2010)
"""
# --- Uniaxial material: Bilin (Modified Ibarra–Krawinkler model)
ops.uniaxialMaterial(
"Bilin",
ele_id,
K,
as_pos,
as_neg,
My_pos,
My_neg,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
# --- Zero-length rotational spring (about Z, dir=6 in 2D frame)
ops.element(
"zeroLength",
ele_id,
node_r,
node_c,
"-mat",
ele_id,
"-dir",
6,
)
# --- Constrain translational DOFs (UX, UY)
ops.equalDOF(node_r, node_c, 1, 2)
Creates a low-stiffness rotational spring used in a leaning column
def rot_leaning_col(ele_id: int, node_r: int, node_c: int, K: float = 1e-9) -> None:
"""
Create a zero-length rotational spring for a leaning column in OpenSeesPy.
This function reproduces the Tcl procedure `rotLeaningCol`:
1) Defines an Elastic uniaxial material with very small stiffness (default K=1e-9)
2) Creates a zeroLength element acting in rotational DOF (dir = 6)
3) Constrains translational DOFs (1, 2) via equalDOF (multi-point constraint)
Parameters
----------
ele_id : int
Unique element (and material) tag for this zero-length rotational spring.
node_r : int
Retained (master) node for the multi-point constraint.
node_c : int
Constrained (slave) node for the multi-point constraint.
K : float, optional
Spring stiffness for the Elastic uniaxial material.
Default is 1e-9 (consistent with the original Tcl script).
Units follow the user's model unit system.
Notes
-----
- The spring is assigned to rotational DOF `6`, consistent with typical 2D frame
conventions in OpenSees where dir=6 corresponds to RZ (rotation about Z).
- Translational DOFs (1, 2) are tied between node_r and node_c to avoid spurious
relative translation across the spring.
"""
# Uniaxial material: Elastic (very small stiffness)
ops.uniaxialMaterial("Elastic", ele_id, K)
# Zero-length rotational spring (about Z): dir = 6
ops.element("zeroLength", ele_id, node_r, node_c, "-mat", ele_id, "-dir", 6)
# Tie translations (UX, UY)
ops.equalDOF(node_r, node_c, 1, 2)
Creates eight elastic elements which form a rectangular panel zone
def elem_panel_zone_2d(
ele_id: int,
node_r: int,
E: float,
A_pz: float,
I_pz: float,
transf_tag: int,
) -> dict:
"""
Create 2D panel-zone rigid-link elements using elasticBeamColumn.
This function reproduces the Tcl procedure `elemPanelZone2D`:
- Derives panel-zone node tags from the base node tag `node_r`
- Creates 8 elasticBeamColumn elements (rigid links) around the joint panel zone
Parameters
----------
ele_id : int
Base element tag for the panel zone (8 elements will be created: ele_id ... ele_id+7).
node_r : int
Node tag for the first point (top-left) of the panel zone. This node tag defines
all other panel-zone node tags by a fixed numbering scheme (as in the Tcl script).
E : float
Young's modulus.
A_pz : float
Cross-sectional area of the rigid links forming the panel zone.
I_pz : float
Moment of inertia of the rigid links forming the panel zone.
transf_tag : int
Geometric transformation tag.
Returns
-------
dict
A dictionary containing:
- "nodes": dict of derived node tags
- "elements": list of created element tags (length 8)
Notes
-----
- This function only creates elements. You must ensure all involved nodes exist.
- DOF convention assumes 2D frame elements (ndm=2, ndf=3) and elasticBeamColumn usage.
- Node numbering scheme is exactly copied from the original Tcl code.
"""
# --- panel zone nodes (copied numbering scheme) ---
node_xy01 = node_r # top left of joint
node_xy02 = node_xy01 + 1 # top left of joint (paired)
node_xy03 = node_xy01 + 2 # top right of joint
node_xy04 = node_xy01 + 3 # top right of joint (paired)
node_xy05 = node_xy01 + 4 # middle right of joint
node_xy06 = node_xy01 + 5 # bottom right of joint
node_xy07 = node_xy01 + 6 # bottom right of joint (paired)
node_xy08 = node_xy01 + 7 # bottom left of joint
node_xy09 = node_xy01 + 8 # bottom left of joint (paired)
node_xy10 = node_xy01 + 9 # middle left of joint
# Tcl: set node_xy6 [expr ($node_xy01-1)/10 + 6]
# Tcl: set node_xy7 [expr ($node_xy01-1)/10 + 7]
# In Tcl, "/" is integer division when both operands are integers.
base = (node_xy01 - 1) // 10
node_xy6 = base + 6 # bottom center of joint
node_xy7 = base + 7 # top center of joint
# --- element tags (8 per panel zone) ---
x1 = ele_id + 0
x2 = ele_id + 1
x3 = ele_id + 2
x4 = ele_id + 3
x5 = ele_id + 4
x6 = ele_id + 5
x7 = ele_id + 6
x8 = ele_id + 7
ele_tags = [x1, x2, x3, x4, x5, x6, x7, x8]
# --- create panel zone elements (elasticBeamColumn) ---
# tag, ndI, ndJ, A, E, I, transfTag
ops.element("elasticBeamColumn", x1, node_xy02, node_xy7, A_pz, E, I_pz, transf_tag)
ops.element("elasticBeamColumn", x2, node_xy7, node_xy03, A_pz, E, I_pz, transf_tag)
ops.element("elasticBeamColumn", x3, node_xy05, node_xy04, A_pz, E, I_pz, transf_tag)
ops.element("elasticBeamColumn", x4, node_xy06, node_xy05, A_pz, E, I_pz, transf_tag)
ops.element("elasticBeamColumn", x5, node_xy6, node_xy07, A_pz, E, I_pz, transf_tag)
ops.element("elasticBeamColumn", x6, node_xy08, node_xy6, A_pz, E, I_pz, transf_tag)
ops.element("elasticBeamColumn", x7, node_xy09, node_xy10, A_pz, E, I_pz, transf_tag)
ops.element("elasticBeamColumn", x8, node_xy10, node_xy01, A_pz, E, I_pz, transf_tag)
return {
"nodes": {
"node_xy01": node_xy01,
"node_xy02": node_xy02,
"node_xy03": node_xy03,
"node_xy04": node_xy04,
"node_xy05": node_xy05,
"node_xy06": node_xy06,
"node_xy07": node_xy07,
"node_xy08": node_xy08,
"node_xy09": node_xy09,
"node_xy10": node_xy10,
"node_xy6": node_xy6,
"node_xy7": node_xy7,
},
"elements": ele_tags,
}
Creates a rotational spring to capture panel zone shear distortions
def rot_panel_zone_2d(
ele_id: int,
node_r: int,
node_c: int,
E: float,
Fy: float,
dc: float,
bf_c: float,
tf_c: float,
tp: float,
db: float,
Ry: float,
a_s: float,
nu: float = 0.30,
) -> dict:
"""
Create a 2D panel-zone rotational spring using a trilinear equivalent
Hysteretic uniaxial material and a zeroLength element (dir=6), plus
equalDOF constraints as in the Tcl procedure `rotPanelZone2D`.
Parameters
----------
ele_id : int
Unique element (and material) tag for this zero-length rotational spring.
node_r : int
Retained (master) node for the zeroLength spring.
node_c : int
Constrained (slave) node for the zeroLength spring.
E : float
Young's modulus.
Fy : float
Yield strength.
dc : float
Column depth.
bf_c : float
Column flange width.
tf_c : float
Column flange thickness.
tp : float
Panel zone thickness.
db : float
Beam depth.
Ry : float
Expected value factor for yield strength (typical 1.2).
NOTE: Kept for interface compatibility with the Tcl script; not used in
the provided Tcl equations.
a_s : float
Assumed strain hardening ratio (as in the Tcl script).
nu : float, optional
Poisson's ratio used to compute shear modulus G = E / (2*(1+nu)).
Default 0.30 (same as Tcl).
Returns
-------
dict
Dictionary with computed stiffness/points and derived node tags, useful
for debugging and reporting.
Notes
-----
- The spring acts on rotational DOF `6` (RZ) using `zeroLength -dir 6`.
- Translational DOFs (1,2) are tied between several node pairs to enforce
rigid panel-zone kinematics (copied from Tcl numbering).
- The Tcl code defines a symmetric Hysteretic material without pinching/damage
(pinchX=1, pinchY=1, damage1=0, damage2=0, beta=0).
"""
# --------------------------
# Trilinear spring backbone
# --------------------------
Vy = 0.55 * Fy * dc * tp # yield shear
G = E / (2.0 * (1.0 + nu)) # shear modulus
Ke = 0.95 * G * tp * dc # elastic stiffness
Kp = 0.95 * G * bf_c * (tf_c * tf_c) / db # plastic stiffness
gamma1_y = Vy / Ke
M1y = gamma1_y * (Ke * db)
gamma2_y = 4.0 * gamma1_y
M2y = M1y + (Kp * db) * (gamma2_y - gamma1_y)
gamma3_y = 100.0 * gamma1_y
M3y = M2y + (a_s * Ke * db) * (gamma3_y - gamma2_y)
# --------------------------
# Uniaxial material (Hysteretic)
# --------------------------
# Tcl:
# uniaxialMaterial Hysteretic eleID
# M1y gamma1_y M2y gamma2_y M3y gamma3_y
# -M1y -gamma1_y -M2y -gamma2_y -M3y -gamma3_y
# 1 1 0.0 0.0 0.0
ops.uniaxialMaterial(
"Hysteretic",
ele_id,
M1y,
gamma1_y,
M2y,
gamma2_y,
M3y,
gamma3_y,
-M1y,
-gamma1_y,
-M2y,
-gamma2_y,
-M3y,
-gamma3_y,
1.0,
1.0, # pinchX, pinchY (no pinching)
0.0,
0.0, # damage1, damage2 (no damage)
0.0, # beta
)
# --------------------------
# ZeroLength rotational spring
# --------------------------
ops.element("zeroLength", ele_id, node_r, node_c, "-mat", ele_id, "-dir", 6)
# Tie translations between spring nodes
ops.equalDOF(node_r, node_c, 1, 2)
# --------------------------
# Additional MPC constraints (copied numbering scheme)
# --------------------------
# Left Top Corner of PZ
nodeR_1 = node_r - 2
nodeR_2 = nodeR_1 + 1
# Right Bottom Corner of PZ
nodeR_6 = node_r + 3
nodeR_7 = nodeR_6 + 1
# Left Bottom Corner of PZ
nodeL_8 = node_r + 5
nodeL_9 = nodeL_8 + 1
ops.equalDOF(nodeR_1, nodeR_2, 1, 2)
ops.equalDOF(nodeR_6, nodeR_7, 1, 2)
ops.equalDOF(nodeL_8, nodeL_9, 1, 2)
return {
"Vy": Vy,
"G": G,
"Ke": Ke,
"Kp": Kp,
"gamma1_y": gamma1_y,
"gamma2_y": gamma2_y,
"gamma3_y": gamma3_y,
"M1y": M1y,
"M2y": M2y,
"M3y": M3y,
"nodes": {
"node_r": node_r,
"node_c": node_c,
"nodeR_1": nodeR_1,
"nodeR_2": nodeR_2,
"nodeR_6": nodeR_6,
"nodeR_7": nodeR_7,
"nodeL_8": nodeL_8,
"nodeL_9": nodeL_9,
},
}
Geometry definitions¶
NStories = 2
NBays = 1
WBay = 30.0 * 12.0
HStory1 = 15.0 * 12.0
HStoryTyp = 12.0 * 12.0
HBuilding = HStory1 + (NStories - 1) * HStoryTyp
Pier1 = 0.0
Pier2 = Pier1 + WBay
Pier3 = Pier2 + WBay # P-delta column line
Floor1 = 0.0
Floor2 = Floor1 + HStory1
Floor3 = Floor2 + HStoryTyp
# panel zone dimensions
pzlat23 = 24.5 / 2.0 # half column depth
pzvert23 = 27.1 / 2.0 # half beam depth
# plastic hinge offsets from beam-column centerlines
phlat23 = pzlat23 + 7.5 + 22.5 / 2.0
phvert23 = pzvert23 + 0.0
# ------------------------------------------------------------
# Masses
# ------------------------------------------------------------
g = 386.2
Floor2Weight = 535.0
Floor3Weight = 525.0
WBuilding = Floor2Weight + Floor3Weight
NodalMass2 = (Floor2Weight / g) / 2.0
NodalMass3 = (Floor3Weight / g) / 2.0
Negligible = 1e-9
Build the model¶
%%
def build_model() -> None:
"""
Build the concentrated-plasticity + panel-zone model (2D, 2-story, 1-bay + P-delta column)
converted from the provided Tcl script.
Parameters
----------
analysis_type : {"pushover", "dynamic"}
Choose analysis type.
"""
# ------------------------------------------------------------
# Set up & output directory
# ------------------------------------------------------------
ops.wipe()
ops.model("BasicBuilder", "-ndm", 2, "-ndf", 3)
# ------------------------------------------------------------
# Nodes (direct translation)
# ------------------------------------------------------------
# Base / P-delta
ops.node(11, Pier1, Floor1)
ops.node(21, Pier2, Floor1)
ops.node(31, Pier3, Floor1)
ops.node(32, Pier3, Floor2)
ops.node(33, Pier3, Floor3)
# Column hinge nodes
ops.node(117, Pier1, Floor1)
ops.node(217, Pier2, Floor1)
ops.node(125, Pier1, Floor2 - phvert23)
ops.node(126, Pier1, Floor2 - phvert23)
ops.node(225, Pier2, Floor2 - phvert23)
ops.node(226, Pier2, Floor2 - phvert23)
ops.node(326, Pier3, Floor2)
ops.node(127, Pier1, Floor2 + phvert23)
ops.node(128, Pier1, Floor2 + phvert23)
ops.node(227, Pier2, Floor2 + phvert23)
ops.node(228, Pier2, Floor2 + phvert23)
ops.node(327, Pier3, Floor2)
ops.node(135, Pier1, Floor3 - phvert23)
ops.node(136, Pier1, Floor3 - phvert23)
ops.node(235, Pier2, Floor3 - phvert23)
ops.node(236, Pier2, Floor3 - phvert23)
ops.node(336, Pier3, Floor3)
# Beam hinge nodes
ops.node(121, Pier1 + phlat23, Floor2)
ops.node(122, Pier1 + phlat23, Floor2)
ops.node(223, Pier2 - phlat23, Floor2)
ops.node(224, Pier2 - phlat23, Floor2)
ops.node(131, Pier1 + phlat23, Floor3)
ops.node(132, Pier1 + phlat23, Floor3)
ops.node(233, Pier2 - phlat23, Floor3)
ops.node(234, Pier2 - phlat23, Floor3)
# Panel zone nodes (Pier 1, Floor 2)
ops.node(1201, Pier1 - pzlat23, Floor2 + phvert23)
ops.node(1202, Pier1 - pzlat23, Floor2 + phvert23)
ops.node(1203, Pier1 + pzlat23, Floor2 + phvert23)
ops.node(1204, Pier1 + pzlat23, Floor2 + phvert23)
ops.node(1205, Pier1 + pzlat23, Floor2)
ops.node(1206, Pier1 + pzlat23, Floor2 - phvert23)
ops.node(1207, Pier1 + pzlat23, Floor2 - phvert23)
ops.node(1208, Pier1 - pzlat23, Floor2 - phvert23)
ops.node(1209, Pier1 - pzlat23, Floor2 - phvert23)
ops.node(1210, Pier1 - pzlat23, Floor2)
# Panel zone nodes (Pier 2, Floor 2)
ops.node(2201, Pier2 - pzlat23, Floor2 + phvert23)
ops.node(2202, Pier2 - pzlat23, Floor2 + phvert23)
ops.node(2203, Pier2 + pzlat23, Floor2 + phvert23)
ops.node(2204, Pier2 + pzlat23, Floor2 + phvert23)
ops.node(2205, Pier2 + pzlat23, Floor2)
ops.node(2206, Pier2 + pzlat23, Floor2 - phvert23)
ops.node(2207, Pier2 + pzlat23, Floor2 - phvert23)
ops.node(2208, Pier2 - pzlat23, Floor2 - phvert23)
ops.node(2209, Pier2 - pzlat23, Floor2 - phvert23)
ops.node(2210, Pier2 - pzlat23, Floor2)
# Panel zone nodes (Pier 1, Floor 3)
ops.node(1301, Pier1 - pzlat23, Floor3 + phvert23)
ops.node(1302, Pier1 - pzlat23, Floor3 + phvert23)
ops.node(1303, Pier1 + pzlat23, Floor3 + phvert23)
ops.node(1304, Pier1 + pzlat23, Floor3 + phvert23)
ops.node(1305, Pier1 + pzlat23, Floor3)
ops.node(1306, Pier1 + pzlat23, Floor3 - phvert23)
ops.node(1307, Pier1 + pzlat23, Floor3 - phvert23)
ops.node(1308, Pier1 - pzlat23, Floor3 - phvert23)
ops.node(1309, Pier1 - pzlat23, Floor3 - phvert23)
ops.node(1310, Pier1 - pzlat23, Floor3)
ops.node(137, Pier1, Floor3 + phvert23) # extra top node (no column above)
# Panel zone nodes (Pier 2, Floor 3)
ops.node(2301, Pier2 - pzlat23, Floor3 + phvert23)
ops.node(2302, Pier2 - pzlat23, Floor3 + phvert23)
ops.node(2303, Pier2 + pzlat23, Floor3 + phvert23)
ops.node(2304, Pier2 + pzlat23, Floor3 + phvert23)
ops.node(2305, Pier2 + pzlat23, Floor3)
ops.node(2306, Pier2 + pzlat23, Floor3 - phvert23)
ops.node(2307, Pier2 + pzlat23, Floor3 - phvert23)
ops.node(2308, Pier2 - pzlat23, Floor3 - phvert23)
ops.node(2309, Pier2 - pzlat23, Floor3 - phvert23)
ops.node(2310, Pier2 - pzlat23, Floor3)
ops.node(237, Pier2, Floor3 + phvert23)
# ------------------------------------------------------------
# Mass assignment (only at joint nodes)
# ------------------------------------------------------------
ops.mass(1205, NodalMass2, Negligible, Negligible)
ops.mass(2205, NodalMass2, Negligible, Negligible)
ops.mass(1305, NodalMass3, Negligible, Negligible)
ops.mass(2305, NodalMass3, Negligible, Negligible)
# equalDOF constraints for rigid diaphragm in x
dof1 = 1
ops.equalDOF(1205, 2205, dof1)
ops.equalDOF(1205, 32, dof1)
ops.equalDOF(1305, 2305, dof1)
ops.equalDOF(1305, 33, dof1)
# Base fixities
ops.fix(11, 1, 1, 1)
ops.fix(21, 1, 1, 1)
ops.fix(31, 1, 1, 0) # P-delta column pinned
# ------------------------------------------------------------
# Section properties / materials
# ------------------------------------------------------------
Es = 29000.0
Fy = 50.0
# Columns W24x131
Acol_12 = 38.5
Icol_12 = 4020.0
Mycol_12 = 20350.0
dcol_12 = 24.5
bfcol_12 = 12.9
tfcol_12 = 0.96
twcol_12 = 0.605
# Beams W27x102
Abeam_23 = 30.0
Ibeam_23 = 3620.0
Mybeam_23 = 10938.0
dbeam_23 = 27.1
# n-modification
n = 10.0
Icol_12mod = Icol_12 * (n + 1.0) / n
Ibeam_23mod = Ibeam_23 * (n + 1.0) / n
Ks_col_1 = n * 6.0 * Es * Icol_12mod / (HStory1 - phvert23)
Ks_col_2 = n * 6.0 * Es * Icol_12mod / (HStoryTyp - 2.0 * phvert23)
Ks_beam_23 = n * 6.0 * Es * Ibeam_23mod / (WBay - 2.0 * phlat23)
# ------------------------------------------------------------
# Geometric transformation
# ------------------------------------------------------------
PDeltaTransf = 1
ops.geomTransf("PDelta", PDeltaTransf)
# ------------------------------------------------------------
# Elastic frame elements
# ------------------------------------------------------------
# Columns
ops.element("elasticBeamColumn", 111, 117, 125, Acol_12, Es, Icol_12mod, PDeltaTransf)
ops.element("elasticBeamColumn", 121, 217, 225, Acol_12, Es, Icol_12mod, PDeltaTransf)
ops.element("elasticBeamColumn", 112, 128, 135, Acol_12, Es, Icol_12mod, PDeltaTransf)
ops.element("elasticBeamColumn", 122, 228, 235, Acol_12, Es, Icol_12mod, PDeltaTransf)
# Beams (note: some use unmodified I, some use modified I)
ops.element("elasticBeamColumn", 2121, 1205, 121, Abeam_23, Es, Ibeam_23, PDeltaTransf)
ops.element("elasticBeamColumn", 212, 122, 223, Abeam_23, Es, Ibeam_23mod, PDeltaTransf)
ops.element("elasticBeamColumn", 2122, 224, 2210, Abeam_23, Es, Ibeam_23, PDeltaTransf)
ops.element("elasticBeamColumn", 2131, 1305, 131, Abeam_23, Es, Ibeam_23, PDeltaTransf)
ops.element("elasticBeamColumn", 213, 132, 233, Abeam_23, Es, Ibeam_23mod, PDeltaTransf)
ops.element("elasticBeamColumn", 2132, 234, 2310, Abeam_23, Es, Ibeam_23, PDeltaTransf)
# ------------------------------------------------------------
# P-delta column + rigid trusses
# ------------------------------------------------------------
TrussMatID = 600
Arigid = 1000.0
Irigid = 100000.0
ops.uniaxialMaterial("Elastic", TrussMatID, Es)
ops.element("truss", 622, 2205, 32, Arigid, TrussMatID)
ops.element("truss", 623, 2305, 33, Arigid, TrussMatID)
ops.element("elasticBeamColumn", 731, 31, 326, Arigid, Es, Irigid, PDeltaTransf)
ops.element("elasticBeamColumn", 732, 327, 336, Arigid, Es, Irigid, PDeltaTransf)
# ------------------------------------------------------------
# Panel zone rigid elements (call your converted function)
# ------------------------------------------------------------
Apz = 1000.0
Ipz = 1.0e5
# elem_panel_zone_2d(ele_id, node_r, E, A_pz, I_pz, transf_tag)
elem_panel_zone_2d(500121, 1201, Es, Apz, Ipz, PDeltaTransf)
elem_panel_zone_2d(500221, 2201, Es, Apz, Ipz, PDeltaTransf)
elem_panel_zone_2d(500131, 1301, Es, Apz, Ipz, PDeltaTransf)
elem_panel_zone_2d(500231, 2301, Es, Apz, Ipz, PDeltaTransf)
# ------------------------------------------------------------
# Rotational springs (Modified IK)
# ------------------------------------------------------------
McMy = 1.05
LS = LK = LA = LD = 1000.0
cS = cK = cA = cD = 1.0
th_pP = th_pN = 0.025
th_pcP = th_pcN = 0.3
ResP = ResN = 0.4
th_uP = th_uN = 0.4
DP = DN = 1.0
a_mem = (n + 1.0) * (Mycol_12 * (McMy - 1.0)) / (Ks_col_1 * th_pP)
b = a_mem / (1.0 + n * (1.0 - a_mem))
# Story 1 column springs
rot_spring_2d_mod_ik_model(
3111,
11,
117,
Ks_col_1,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
3211,
21,
217,
Ks_col_1,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
3112,
126,
125,
Ks_col_1,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
3212,
226,
225,
Ks_col_1,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
# Story 2 b recompute
a_mem = (n + 1.0) * (Mycol_12 * (McMy - 1.0)) / (Ks_col_2 * th_pP)
b = a_mem / (1.0 + n * (1.0 - a_mem))
rot_spring_2d_mod_ik_model(
3121,
127,
128,
Ks_col_2,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
3221,
227,
228,
Ks_col_2,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
3122,
136,
135,
Ks_col_2,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
3222,
236,
235,
Ks_col_2,
b,
b,
Mycol_12,
-Mycol_12,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
ops.region(1, "-ele", 3111, 3211, 3112, 3212, 3121, 3221, 3122, 3222)
# Beam springs
th_pP = th_pN = 0.02
th_pcP = th_pcN = 0.16
a_mem = (n + 1.0) * (Mybeam_23 * (McMy - 1.0)) / (Ks_beam_23 * th_pP)
b = a_mem / (1.0 + n * (1.0 - a_mem))
rot_spring_2d_mod_ik_model(
4121,
121,
122,
Ks_beam_23,
b,
b,
Mybeam_23,
-Mybeam_23,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
4122,
223,
224,
Ks_beam_23,
b,
b,
Mybeam_23,
-Mybeam_23,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
4131,
131,
132,
Ks_beam_23,
b,
b,
Mybeam_23,
-Mybeam_23,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
rot_spring_2d_mod_ik_model(
4132,
233,
234,
Ks_beam_23,
b,
b,
Mybeam_23,
-Mybeam_23,
LS,
LK,
LA,
LD,
cS,
cK,
cA,
cD,
th_pP,
th_pN,
th_pcP,
th_pcN,
ResP,
ResN,
th_uP,
th_uN,
DP,
DN,
)
ops.region(2, "-ele", 4121, 4122, 4131, 4132)
# Panel zone springs
Ry = 1.2
as_PZ = 0.03
rot_panel_zone_2d(
41200,
1203,
1204,
Es,
Fy,
dcol_12,
bfcol_12,
tfcol_12,
twcol_12,
dbeam_23,
Ry,
as_PZ,
)
rot_panel_zone_2d(
42200,
2203,
2204,
Es,
Fy,
dcol_12,
bfcol_12,
tfcol_12,
twcol_12,
dbeam_23,
Ry,
as_PZ,
)
rot_panel_zone_2d(
41300,
1303,
1304,
Es,
Fy,
dcol_12,
bfcol_12,
tfcol_12,
twcol_12,
dbeam_23,
Ry,
as_PZ,
)
rot_panel_zone_2d(
42300,
2303,
2304,
Es,
Fy,
dcol_12,
bfcol_12,
tfcol_12,
twcol_12,
dbeam_23,
Ry,
as_PZ,
)
# P-delta leaning column rotational springs (zero stiffness)
rot_leaning_col(5312, 32, 326)
rot_leaning_col(5321, 32, 327)
rot_leaning_col(5322, 33, 336)
ops.region(3, "-ele", 5312, 5321, 5322)
print("Model Built")
Run gravity analyses¶
def run_gravity_analysis() -> None:
ops.wipeAnalysis()
ops.timeSeries("Constant", 101)
ops.pattern("Plain", 101, 101)
P_PD2 = -398.02
P_PD3 = -391.31
ops.load(32, 0.0, P_PD2, 0.0)
ops.load(33, 0.0, P_PD3, 0.0)
P_F2 = 0.5 * (-Floor2Weight - P_PD2)
P_F3 = 0.5 * (-Floor3Weight - P_PD3)
ops.load(127, 0.0, P_F2, 0.0)
ops.load(227, 0.0, P_F2, 0.0)
ops.load(137, 0.0, P_F3, 0.0)
ops.load(237, 0.0, P_F3, 0.0)
Tol = 1.0e-6
ops.constraints("Plain")
ops.numberer("RCM")
ops.system("BandGeneral")
ops.test("NormDispIncr", Tol, 6)
ops.algorithm("Newton")
NstepGravity = 10
DGravity = 1.0 / NstepGravity
ops.integrator("LoadControl", DGravity)
ops.analysis("Static")
ops.analyze(NstepGravity)
ops.loadConst("-time", 0.0)
print("Gravity analysis complete")
Visualize the model¶
build_model()
run_gravity_analysis()
opst.vis.pyvista.plot_model(show_outline=False).show()
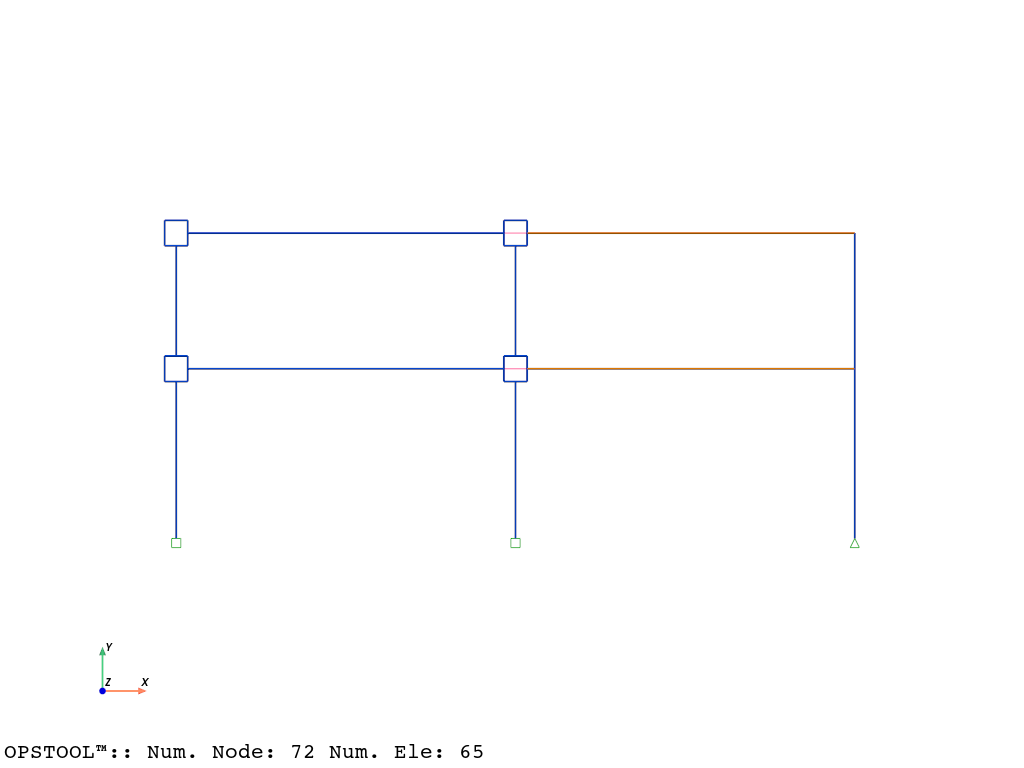
WARNING: DO NOT USE THE "Bilin" MATERIAL, IT HAS BEEN REPLACED. Use "IMKBilin" or "HystereticSM" INSTEAD.
Model Built
Gravity analysis complete
Visualize first and fourth mode shapes¶
opst.vis.pyvista.plot_eigen(mode_tags=[1, 4], subplots=False).show()
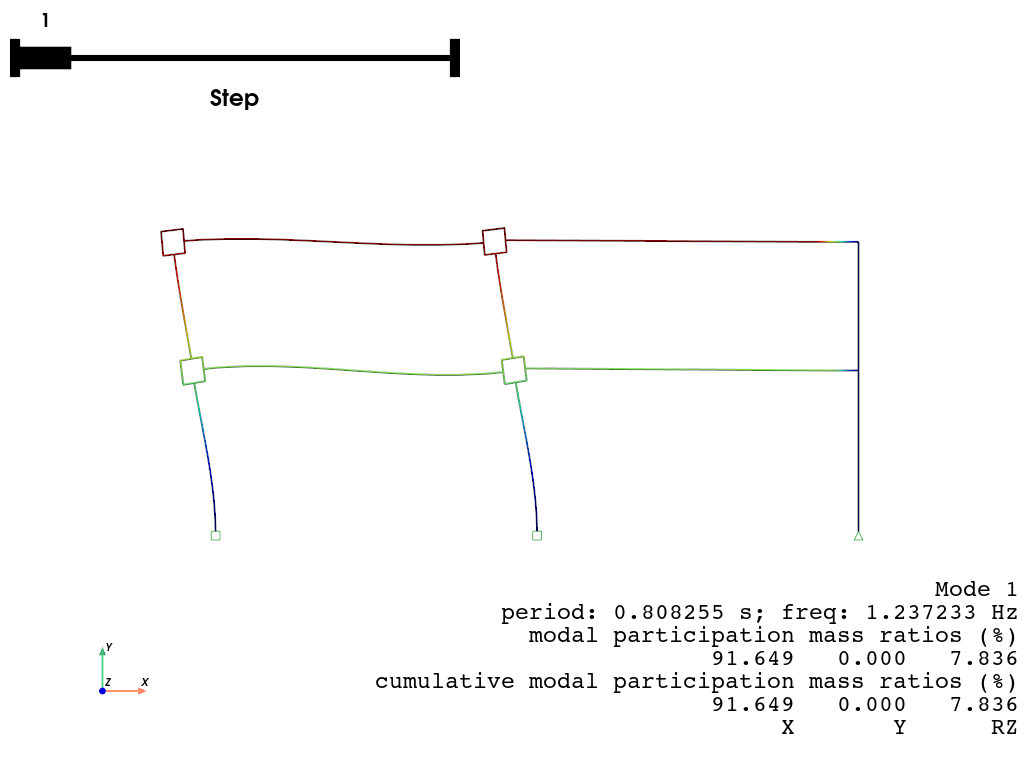
Using DomainModalProperties - Developed by: Massimo Petracca, Guido Camata, ASDEA Software Technology
OPSTOOL™ :: Eigen data has been saved to G:\opstool\docs\.opstool.output/EigenData-Auto.zarr!
Run pushover analysis¶
build_model()
run_gravity_analysis()
Model Built
Gravity analysis complete
Pushover analysis setup
lat2 = 16.255
lat3 = 31.636
ops.timeSeries("Linear", 200)
ops.pattern("Plain", 200, 200)
ops.load(1205, lat2, 0.0, 0.0)
ops.load(2205, lat2, 0.0, 0.0)
ops.load(1305, lat3, 0.0, 0.0)
ops.load(2305, lat3, 0.0, 0.0)
IDctrlNode = 1305
IDctrlDOF = 1
Dmax = 0.1 * HBuilding
Dincr = 0.05
ops.wipeAnalysis()
ops.constraints("Plain")
ops.numberer("RCM")
ops.system("BandGeneral")
ops.test("NormUnbalance", 1.0e-5, 400)
ops.algorithm("Newton")
ops.integrator("DisplacementControl", IDctrlNode, IDctrlDOF, Dincr)
ops.analysis("Static")
Pushover analysis loop and ODB recording
smart_analysis = opst.anlys.SmartAnalyze(
analysis_type="Static",
testTol=1.0e-6,
testType="NormDispIncr",
testIterTimes=100,
tryAddTestTimes=True, # add test times to the analysis
testIterTimesMore=[250, 500, 1000],
tryAlterAlgoTypes=False, # fix algorithm
algoTypes=[40], # algorithm is KrylovNewton
relaxation=0.5,
minStep=1e-6, # minimum step size for substepping
debugMode=True,
printPer=100,
)
segs = smart_analysis.static_split(targets=[0, Dmax], maxStep=Dincr)
ODB = opst.post.CreateODB(odb_tag="pushover", interpolate_beam_disp=True)
for seg in segs:
smart_analysis.StaticAnalyze(node=IDctrlNode, dof=IDctrlDOF, seg=seg)
ODB.fetch_response_step()
ODB.save_response()
print("Pushover complete")
>>> ✳️ OPSTOOL::SmartAnalyze:: Setting algorithm to KrylovNewton ...
>>> ✅ OPSTOOL::SmartAnalyze:: progress 15.432 %. Time consumption: 0.921 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 30.864 %. Time consumption: 1.612 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 46.296 %. Time consumption: 2.307 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 61.728 %. Time consumption: 2.992 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 77.160 %. Time consumption: 3.686 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 92.593 %. Time consumption: 4.374 s.
>>> 🎉 OPSTOOL::SmartAnalyze:: Successfully finished! Time consumption: 4.702 s. 🎉
OPSTOOL™ :: All responses data with _odb_tag = pushover saved in
G:\opstool\docs\.opstool.output\RespStepData-pushover.odb!
Pushover complete
Postprocessing pushover anslysis results¶
Pushover plots¶
plot disp
opst.vis.pyvista.plot_nodal_responses(
odb_tag="pushover",
resp_type="disp",
slides=True,
interpolate_beam_disp=True,
defo_scale=5.0,
).show()
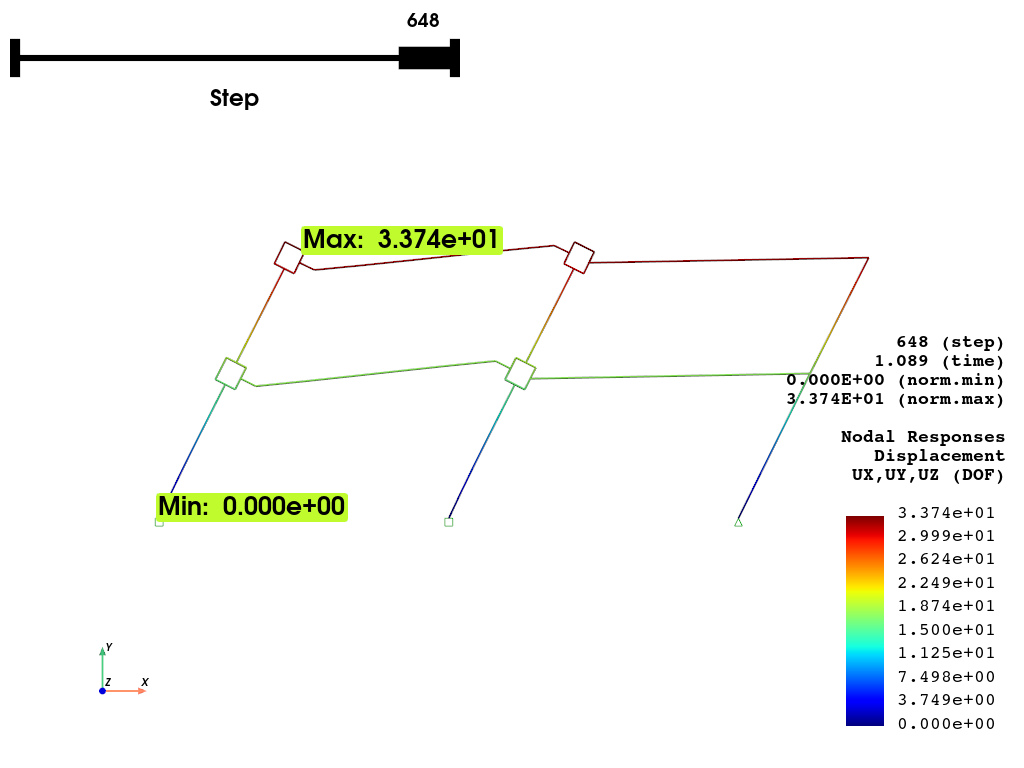
OPSTOOL™ :: Loading responses data from G:\opstool\docs\.opstool.output\RespStepData-pushover.odb ...
plot section forces
opst.vis.pyvista.plot_frame_responses(
odb_tag="pushover",
resp_type="sectionForces",
slides=False,
).show()
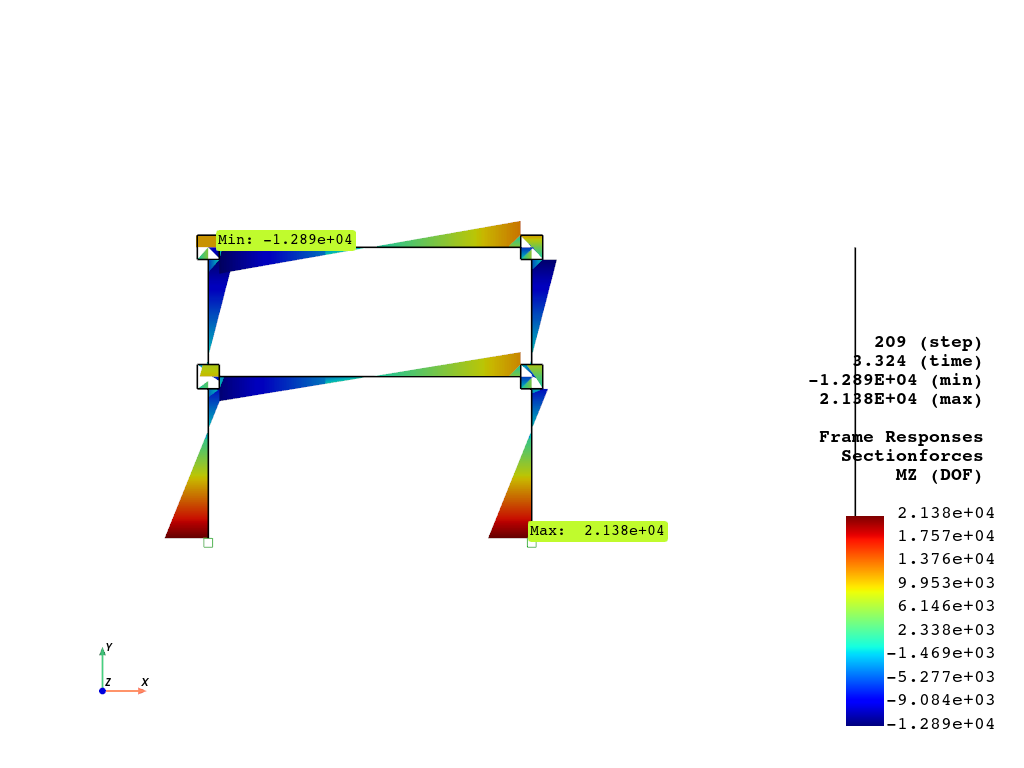
OPSTOOL™ :: Loading responses data from G:\opstool\docs\.opstool.output\RespStepData-pushover.odb ...
plot displacement animation
# opst.vis.pyvista.plot_nodal_responses_animation(
# odb_tag="pushover",
# resp_type="disp",
# interpolate_beam_disp=True,
# defo_scale=2.0,
# framerate=30,
# savefig="pushover_disp_animation.mp4", # mp4 more efficient but gif more widely supported
# ).close()
Pushover data¶
disp_pushover = opst.post.get_nodal_responses(odb_tag="pushover", resp_type="disp")
react_pushover = opst.post.get_nodal_responses(odb_tag="pushover", resp_type="reaction")
print(disp_pushover)
print(react_pushover)
OPSTOOL™ :: Loading disp response data from G:\opstool\docs\.opstool.output\RespStepData-pushover.odb ...
OPSTOOL™ :: Loading reaction response data from G:\opstool\docs\.opstool.output\RespStepData-pushover.odb ...
<xarray.DataArray 'disp' (time: 649, nodeTags: 72, DOFs: 6)> Size: 1MB
array([[[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -4.4436118e-07],
...,
[ 1.8685561e-04, -2.7262092e-02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -4.1580705e-08],
[ 1.8685561e-04, -2.7262092e-02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -6.9950938e-09],
[ 1.8694965e-04, -2.7277712e-02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -6.8283303e-09]],
[[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -1.4927976e-04],
...
0.0000000e+00, -1.0054388e-01],
[ 3.1038769e+01, 1.1918640e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -9.6789598e-02],
[ 3.2350239e+01, 1.1917404e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -9.6783288e-02]],
[[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -9.8876216e-02],
...,
[ 3.1086489e+01, 1.1939133e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -1.0070825e-01],
[ 3.1086489e+01, 1.1939133e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -9.6957892e-02],
[ 3.2400238e+01, 1.1937901e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -9.6951604e-02]]],
shape=(649, 72, 6), dtype=float32)
Coordinates:
* time (time) float32 3kB 0.0 0.06466 0.1293 0.194 ... 1.098 1.093 1.089
* nodeTags (nodeTags) int64 576B 11 21 31 32 33 ... 2306 2307 2308 2309 2310
* DOFs (DOFs) <U2 48B 'UX' 'UY' 'UZ' 'RX' 'RY' 'RZ'
<xarray.DataArray 'reaction' (time: 649, nodeTags: 72, DOFs: 6)> Size: 1MB
array([[[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 7.9213899e-01],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 7.9221976e-01],
[ 3.5074761e-04, 7.8933002e+02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 5.1174906e-15],
...,
[ 5.2678199e-03, -3.3429100e+01, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -1.3585577e-11],
[-5.2678199e-03, 3.3429100e+01, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 1.3946830e-12],
[ 6.2170668e-13, 8.3772989e-12, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -9.6687519e-12]],
[[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 3.9567642e+02],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 3.9567175e+02],
[ 1.1783099e-01, 7.8933002e+02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
...
0.0000000e+00, -1.0266831e-08],
[-1.7378375e+02, 2.6457239e+02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -3.6235883e-07],
[-1.7751367e-07, 1.6630082e-08, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 2.2146787e-07]],
[[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 1.6660080e+04],
[ 0.0000000e+00, 0.0000000e+00, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 1.6660518e+04],
[ 7.8045967e+01, 7.8933002e+02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 0.0000000e+00],
...,
[ 1.7317819e+02, -2.6378641e+02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, -1.1087877e-08],
[-1.7317812e+02, 2.6378647e+02, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 2.6137354e-07],
[ 2.9309660e-08, -2.5756037e-09, 0.0000000e+00, 0.0000000e+00,
0.0000000e+00, 2.9473085e-07]]],
shape=(649, 72, 6), dtype=float32)
Coordinates:
* time (time) float32 3kB 0.0 0.06466 0.1293 0.194 ... 1.098 1.093 1.089
* nodeTags (nodeTags) int64 576B 11 21 31 32 33 ... 2306 2307 2308 2309 2310
* DOFs (DOFs) <U2 48B 'UX' 'UY' 'UZ' 'RX' 'RY' 'RZ'
tota_react_x = react_pushover.sum(dim="nodeTags", skipna=True).sel(DOFs="UX")
disp_x_ctrl = disp_pushover.sel(nodeTags=IDctrlNode, DOFs="UX")
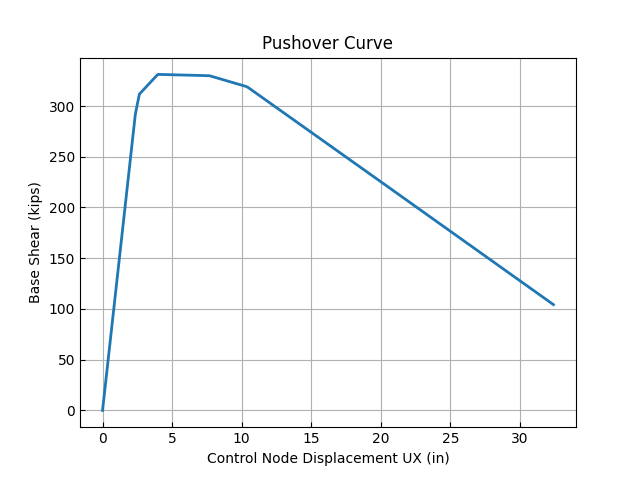
plt.plot(disp_x_ctrl, -tota_react_x, lw=2)
plt.xlabel("Control Node Displacement UX (in)")
plt.ylabel("Base Shear (kips)")
plt.title("Pushover Curve")
plt.grid(True)
plt.show()
Run dynamic analysis¶
build_model()
run_gravity_analysis()
Model Built
Gravity analysis complete
Eigenvalue analysis and Rayleigh damping
pi = 2.0 * np.asin(1.0)
nEigenI = 1
nEigenJ = 2
lam = ops.eigen(nEigenJ) # returns list-like
lamI = lam[nEigenI - 1]
lamJ = lam[nEigenJ - 1]
w1 = np.sqrt(lamI)
w2 = np.sqrt(lamJ)
T1 = 2.0 * pi / w1
T2 = 2.0 * pi / w2
print(f"T1 = {T1} s")
print(f"T2 = {T2} s")
# Rayleigh damping
zeta = 0.02
n = 10.0 # n-modification factor
a0 = zeta * 2.0 * w1 * w2 / (w1 + w2)
a1 = zeta * 2.0 / (w1 + w2)
a1_mod = a1 * (1.0 + n) / n
# Regions for damping (same as Tcl)
ops.region(4, "-eleRange", 111, 213, "-rayleigh", 0.0, 0.0, a1_mod, 0.0)
ops.region(5, "-eleRange", 2121, 2132, "-rayleigh", 0.0, 0.0, a1, 0.0)
ops.region(6, "-eleRange", 500000, 599999, "-rayleigh", 0.0, 0.0, a1, 0.0)
ops.region(7, "-node", 1205, 1305, 2205, 2305, "-rayleigh", a0, 0.0, 0.0, 0.0)
T1 = 0.8153719298020549 s
T2 = 0.18470128260744575 s
Ground motion parameters (you MUST set GMfile correctly)
patternID = 1
GMdirection = 1
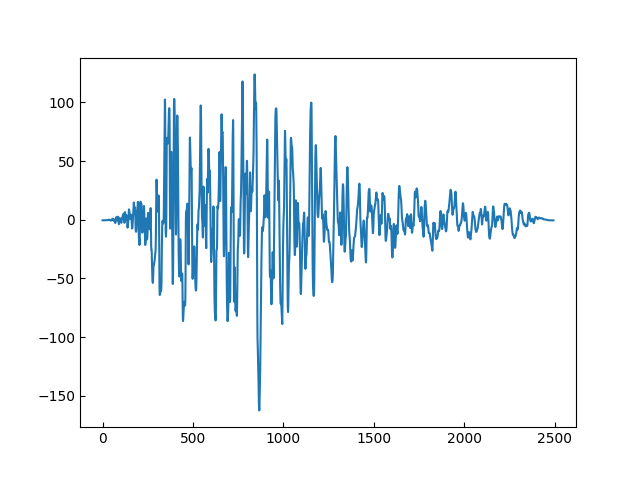
GMfile = "utils/NR94cnp.txt" # <-- change to your accel file (typically .txt/.AT2)
dt = 0.01
Scalefact = 1
gm_data = np.loadtxt(GMfile).ravel() * g
plt.plot(gm_data)
plt.show()
TimeSeries (OpenSeesPy style: define a timeSeries, then reference by tag)
tsTag = 11
ops.timeSeries("Path", tsTag, "-dt", dt, "-values", *gm_data, "-factor", Scalefact)
# Uniform excitation
ops.pattern("UniformExcitation", patternID, GMdirection, "-accel", tsTag)
Transient analysis setup
dt_analysis = dt
ops.wipeAnalysis()
ops.constraints("Plain")
ops.numberer("RCM")
ops.system("UmfPack")
# ops.test("NormDispIncr", 1.0e-8, 10)
# ops.algorithm("Newton")
ops.integrator("Newmark", 0.5, 0.25)
ops.analysis("Transient")
WARNING analysis Transient - no Algorithm yet specified,
NewtonRaphson default will be used
Dynamic analysis loop and ODB recording
NumSteps = len(gm_data)
smart_analysis = opst.anlys.SmartAnalyze(
analysis_type="Transient",
testTol=1.0e-10,
testType="EnergyIncr",
testIterTimes=100,
tryAddTestTimes=True, # add test times to the analysis
testIterTimesMore=[250, 500, 1000],
tryAlterAlgoTypes=False, # fix algorithm
algoTypes=[40], # algorithm is KrylovNewton
relaxation=0.5,
minStep=1e-6, # minimum step size for substepping
debugMode=True,
printPer=100,
)
smart_analysis.transient_split(NumSteps)
ODB = opst.post.CreateODB(odb_tag="dynamic", interpolate_beam_disp=True)
for _ in range(NumSteps):
smart_analysis.TransientAnalyze(dt_analysis)
ODB.fetch_response_step()
ODB.save_response()
print("Dynamic analysis complete")
>>> ✳️ OPSTOOL::SmartAnalyze:: Setting algorithm to KrylovNewton ...
>>> ✅ OPSTOOL::SmartAnalyze:: progress 4.008 %. Time consumption: 0.846 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 8.016 %. Time consumption: 1.575 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 12.024 %. Time consumption: 2.292 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 16.032 %. Time consumption: 3.059 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 20.040 %. Time consumption: 3.766 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 24.048 %. Time consumption: 4.489 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 28.056 %. Time consumption: 5.223 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 32.064 %. Time consumption: 5.942 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 7041.12 (max: 1e-10) Norm deltaX: 10.5354, Norm deltaR: 63939.7
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 8.15
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 7.041e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 7.041e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 7.041e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 2462.82 (max: 1e-10) Norm deltaX: 14.9475, Norm deltaR: 211152
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 8.145
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 5.000e-03 into 2.500e-03 and 2.500e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.0025000000000000005,
remaining sub-step size 0.0075
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 1750.31 (max: 1e-10) Norm deltaX: 6.25162, Norm deltaR: 64499.9
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 8.43
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.750e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.750e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.750e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 36.072 %. Time consumption: 6.726 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 40.080 %. Time consumption: 7.529 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 162.991 (max: 1e-10) Norm deltaX: 0.344198, Norm deltaR: 24868.6
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 10.9
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 250.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 250 iterations
current EnergyIncr: 20618.3 (max: 1e-10) Norm deltaX: 439.684, Norm deltaR: 194232
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 10.9
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 2.062e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 2.062e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 44.088 %. Time consumption: 8.307 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 48.096 %. Time consumption: 9.046 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 7827.97 (max: 1e-10) Norm deltaX: 15.8857, Norm deltaR: 52609.1
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 12.58
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 7.828e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 7.828e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 7.828e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 56.0318 (max: 1e-10) Norm deltaX: 0.124589, Norm deltaR: 18887.4
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 12.575
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 5.000e-03 into 2.500e-03 and 2.500e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.0025000000000000005,
remaining sub-step size 0.0075
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 52.104 %. Time consumption: 9.817 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 149.331 (max: 1e-10) Norm deltaX: 0.0944207, Norm deltaR: 33654.4
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 13.81
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 250.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 250 iterations
current EnergyIncr: 310.102 (max: 1e-10) Norm deltaX: 0.187238, Norm deltaR: 35258.8
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 13.81
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 500.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 500 iterations
current EnergyIncr: 281.474 (max: 1e-10) Norm deltaX: 0.360815, Norm deltaR: 37217.4
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 13.81
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 1000.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 1000 iterations
current EnergyIncr: 149.331 (max: 1e-10) Norm deltaX: 0.0944207, Norm deltaR: 33654.4
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 13.81
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 56.112 %. Time consumption: 10.797 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 2286.71 (max: 1e-10) Norm deltaX: 5.55223, Norm deltaR: 39416.5
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 14.76
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 2.287e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 2.287e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 2.287e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 2302.09 (max: 1e-10) Norm deltaX: 89.1962, Norm deltaR: 8329.33
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 14.755
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 5.000e-03 into 2.500e-03 and 2.500e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.0025000000000000005,
remaining sub-step size 0.0075
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 60.120 %. Time consumption: 11.558 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 5591.2 (max: 1e-10) Norm deltaX: 69.0487, Norm deltaR: 248512
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 15.59
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 5.591e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 5.591e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 5.591e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 64.128 %. Time consumption: 12.315 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 15005 (max: 1e-10) Norm deltaX: 287.667, Norm deltaR: 76612.8
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 16.85
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.500e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.500e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.500e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 68.136 %. Time consumption: 13.063 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 130.737 (max: 1e-10) Norm deltaX: 0.0938715, Norm deltaR: 29636.3
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 17.26
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 250.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 250 iterations
current EnergyIncr: 317.087 (max: 1e-10) Norm deltaX: 0.187261, Norm deltaR: 36048
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 17.26
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 500.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 500 iterations
current EnergyIncr: 231.876 (max: 1e-10) Norm deltaX: 0.308312, Norm deltaR: 34528.8
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 17.26
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 1000.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 1000 iterations
current EnergyIncr: 130.737 (max: 1e-10) Norm deltaX: 0.0938715, Norm deltaR: 29636.3
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 17.26
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 72.144 %. Time consumption: 14.047 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 119.805 (max: 1e-10) Norm deltaX: 0.0935683, Norm deltaR: 27246
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 18.9
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 250.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 250 iterations
current EnergyIncr: 321.284 (max: 1e-10) Norm deltaX: 0.187258, Norm deltaR: 36524.6
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 18.9
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 500.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 500 iterations
current EnergyIncr: 203.763 (max: 1e-10) Norm deltaX: 0.271334, Norm deltaR: 33005.6
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 18.9
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Adding test times to 1000.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 1000 iterations
current EnergyIncr: 119.805 (max: 1e-10) Norm deltaX: 0.0935683, Norm deltaR: 27246
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 18.9
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 76.152 %. Time consumption: 15.011 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 80.160 %. Time consumption: 15.753 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 1643.44 (max: 1e-10) Norm deltaX: 5.28483, Norm deltaR: 45599.6
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 20.99
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.643e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.643e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.643e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 2378.9 (max: 1e-10) Norm deltaX: 13.2043, Norm deltaR: 53440.3
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 20.985
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 5.000e-03 into 2.500e-03 and 2.500e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.0025000000000000005,
remaining sub-step size 0.0075
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 84.168 %. Time consumption: 16.521 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 88.176 %. Time consumption: 17.248 s.
>>> ✅ OPSTOOL::SmartAnalyze:: progress 92.184 %. Time consumption: 17.976 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 3906.84 (max: 1e-10) Norm deltaX: 7.5742, Norm deltaR: 43145.6
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 23.2
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 3.907e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 3.907e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 3.907e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 4028.79 (max: 1e-10) Norm deltaX: 7.48904, Norm deltaR: 44887.2
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 23.195
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 5.000e-03 into 2.500e-03 and 2.500e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.0025000000000000005,
remaining sub-step size 0.0075
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 3974.5 (max: 1e-10) Norm deltaX: 7.59071, Norm deltaR: 43739.8
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 24
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 3.975e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 3.975e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 3.975e+03.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> ✅ OPSTOOL::SmartAnalyze:: progress 96.192 %. Time consumption: 18.754 s.
WARNING: CTestEnergyIncr::test() - failed to converge
after: 100 iterations
current EnergyIncr: 12521.6 (max: 1e-10) Norm deltaX: 140.215, Norm deltaR: 50911.8
AcceleratedNewton::solveCurrentStep() -The ConvergenceTest object failed in test()
DirectIntegrationAnalysis::analyze() - the Algorithm failed at time 24.82
OpenSees > analyze failed, returned: -3 error flag
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.252e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.252e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Not adding test times for norm 1.252e+04.
>>> ✳️ OPSTOOL::SmartAnalyze:: Dividing the current step 1.000e-02 into 5.000e-03 and 5.000e-03
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.005, remaining sub-step
size 0.005
>>> ✳️ OPSTOOL::SmartAnalyze:: Current total step size 0.01, completed sub-step size 0.01, remaining sub-step
size 0.0
>>> 🎉 OPSTOOL::SmartAnalyze:: Successfully finished! Time consumption: 19.463 s. 🎉
OPSTOOL™ :: All responses data with _odb_tag = dynamic saved in
G:\opstool\docs\.opstool.output\RespStepData-dynamic.odb!
Dynamic analysis complete
Seismic analysis postprocessing¶
plot disp
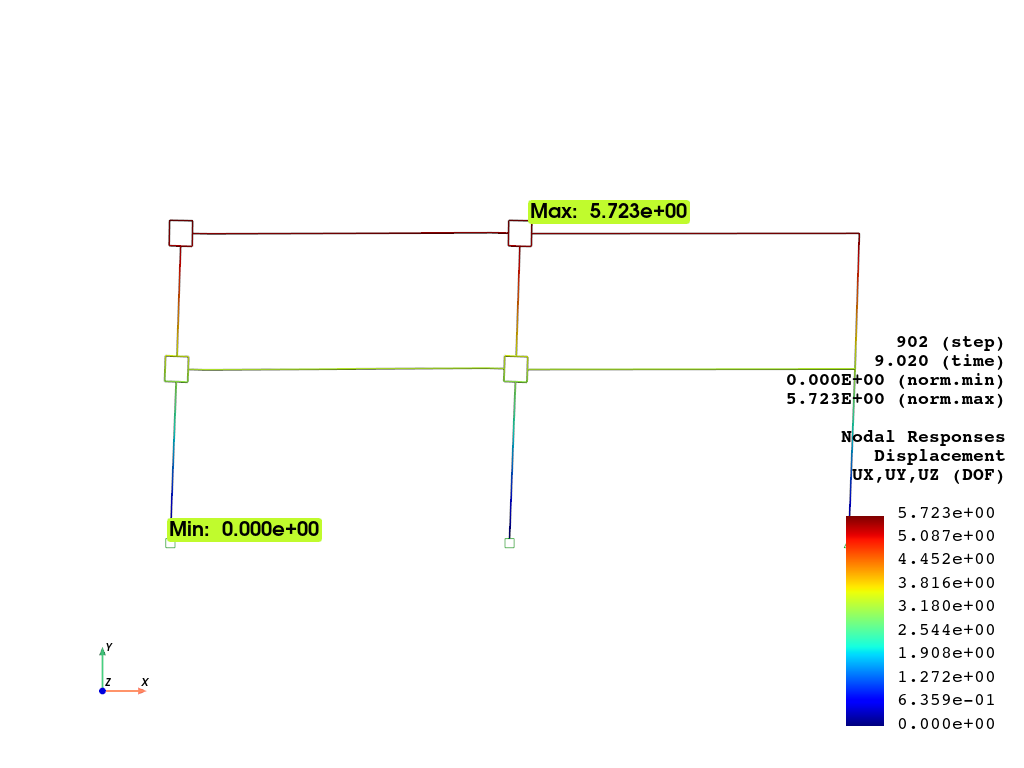
opst.vis.pyvista.plot_nodal_responses(
odb_tag="dynamic",
resp_type="disp",
slides=False,
interpolate_beam_disp=False,
defo_scale=2.0,
).show()
OPSTOOL™ :: Loading responses data from G:\opstool\docs\.opstool.output\RespStepData-dynamic.odb ...
# opst.vis.pyvista.plot_nodal_responses_animation(
# odb_tag="dynamic",
# resp_type="disp",
# interpolate_beam_disp=False,
# defo_scale=3.0,
# framerate=300,
# savefig="dynamic_disp_animation.mp4", # mp4 more efficient but gif more widely supported
# ).close()
disp_dynamcic = opst.post.get_nodal_responses(odb_tag="dynamic", resp_type="disp")
react_dynamcic = opst.post.get_nodal_responses(odb_tag="dynamic", resp_type="reaction")
OPSTOOL™ :: Loading disp response data from G:\opstool\docs\.opstool.output\RespStepData-dynamic.odb ...
OPSTOOL™ :: Loading reaction response data from G:\opstool\docs\.opstool.output\RespStepData-dynamic.odb ...
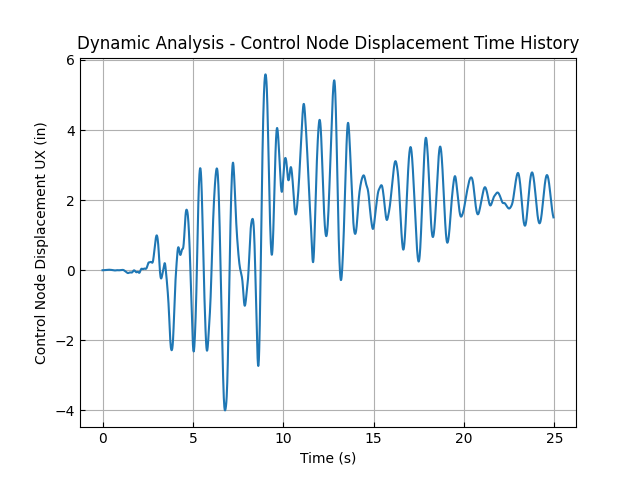
disp_ctr = disp_dynamcic.sel(nodeTags=IDctrlNode, DOFs="UX")
plt.plot(disp_ctr.time, disp_ctr)
plt.xlabel("Time (s)")
plt.ylabel("Control Node Displacement UX (in)")
plt.title("Dynamic Analysis - Control Node Displacement Time History")
plt.grid(True)
plt.show()
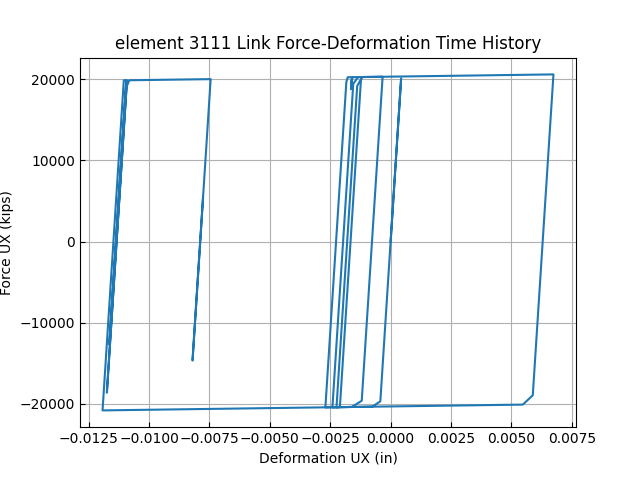
link_resp = opst.post.get_element_responses(odb_tag="dynamic", ele_type="Link")
defo = link_resp["basicDeformation"].sel(eleTags=3111, DOFs="UX")
forces = link_resp["basicForce"].sel(eleTags=3111, DOFs="UX")
plt.plot(defo, forces)
plt.xlabel("Deformation UX (in)")
plt.ylabel("Force UX (kips)")
plt.title("element 3111 Link Force-Deformation Time History")
plt.grid(True)
plt.show()
OPSTOOL™ :: Loading Link response data from G:\opstool\docs\.opstool.output\RespStepData-dynamic.odb ...
Total running time of the script: (0 minutes 35.923 seconds)